
科研设施
船舶操纵与控制天美平台
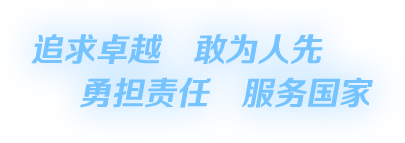
船舶操纵与控制天美平台的主要设备有垂直面平面运动机构(VPMM)和大振幅水平面平面运动机构(LAHPMM)。这些设备目前在国内处于领先水平。利用以上设备,可进行水下运载器六自由度数学模型的研究以及地效翼船🧜🏽♀️、气垫船🛻、集装箱船和双桨双舵船的操纵性研究。
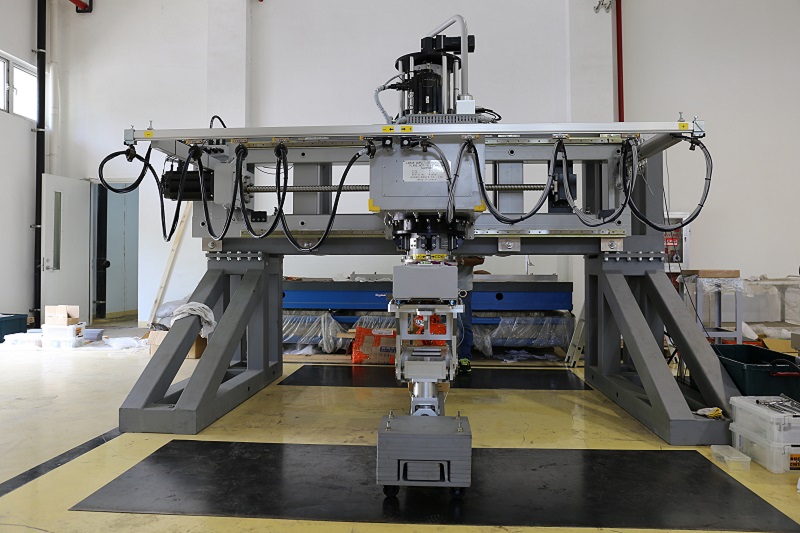
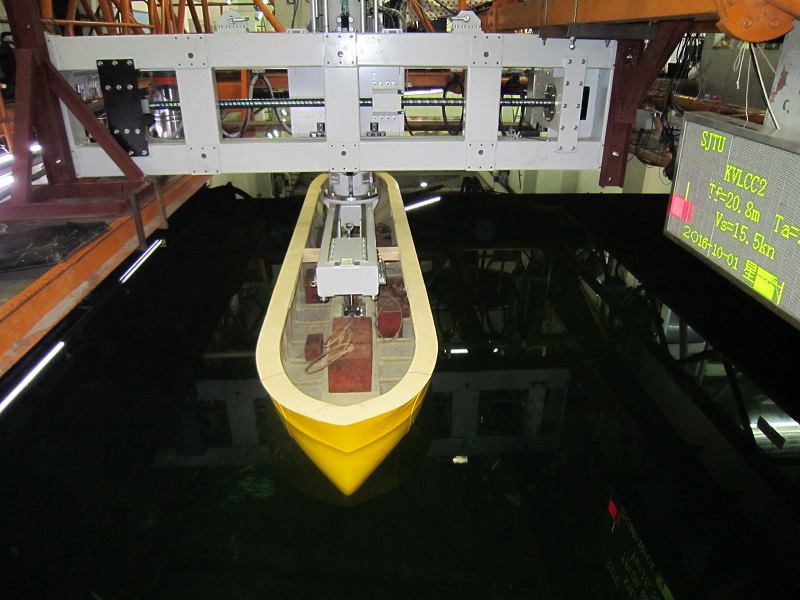
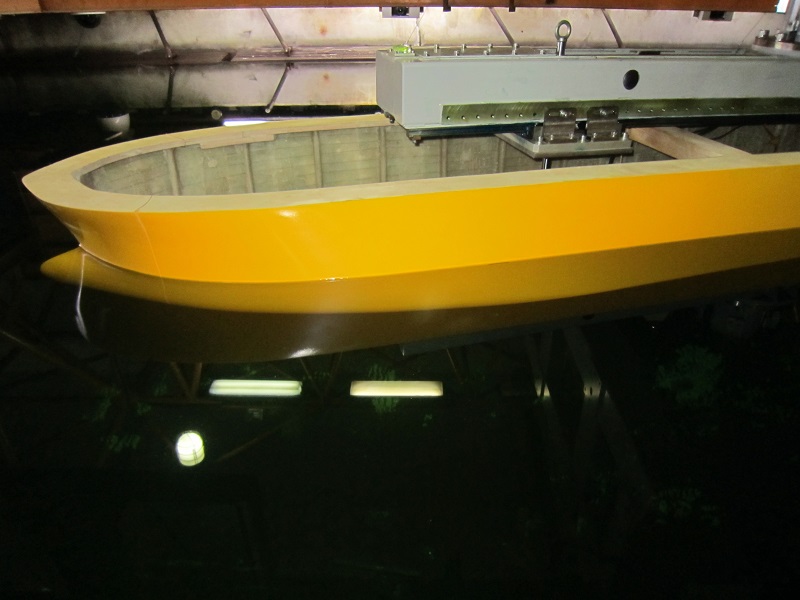
船舶操纵与控制天美平台开发了自航模试验系统🙆♀️,开展多种船型的自航模试验,包括集装箱船🕯、LNG船(双桨状态、单桨状态)和VLCC船。并且重点进行了VLCC船不同装载状态对操纵性能影响的研究👩🏻🦯🔻。
天美平台已完成了基于无线传输的自航模试验波高测量。提出了自航模试验系统的通用无线测量平台概念👮🏼,使得可以在现有自航模试验系统上添加各类测量传感器,投放至无线信号覆盖范围内的任意位置进行物理量的测量💧,满足未来复杂多变的测量需求。同时正在研制水下轨迹测量和通信装置📪,用以进行水下运载器的自航模试验。
天美平台还进行水下拖曳系统的动力学研究,包括拖缆拖体的水动力测试和拖曳系统的拖缆的张力姿态等的数值模拟。
地址:上海市闵行区东川路800号,200240
电话:+86-021-34207184
传真:+86-021-34207184
邮箱⛹🏻🦸🏼♂️:shiplb@sjtu.edu.cn
Copyright@天美平台 - 顶级代理,年入百万! 版权所有
地址☝🏼:上海市徐汇区华山路1954号,200030
电话: +86-021-62933063